

![]()
LELO F1 SDK Python client
WARNING: COMPATIBILITY WITH THE LATEST VERSION OF THE DEVICE (F1S V2) IS WORK IN PROGRESS. PLEASE GET IN TOUCH IF YOU ARE AVAILABLE FOR BETA TESTING.
Python package to provide a BLE client to LELO's F1 SDK.
The original and official repository with sample code for Android and iOS as well as BLE specifications can be found at https://github.com/LELO-Devs/F1s-SDK.
This is an alternative Python (3.6+) wrapper. It supports all of the features listed in the BLE specifications (see following 'available methods').
Since the bluetooth communication is based on the bleak module, the following operative systems are supported:
- Windows 10, version 16299 (Fall Creators Update) or greater
- Linux distributions with BlueZ >= 5.43
- OS X/macOS support via Core Bluetooth API, from at least OS X version 10.11
Installation
This package requires python 3.6+ and supports up to python 3.7.
You can install from pip:
$ pip install lelof1pyDependencies
The library requires:
- asyncio - async coroutines management
- bleak - cross-platform BLE client
Running the sample requires:
- appdirs
- pysimplegui - for the GUI samples
- matplotlib - for the graph sample
Warning: currently, on python 3.8 there could be some problems with installing the dependency pythonnet via pip.
If you have problems running pip install lelof1py you can:
- try using a python version lower than 3.8, ideally 3.6
- use a virtual environment with a lower python version (ideally 3.6)
- open an issue
Demo
Two examples are included in this repository: sample_cli.py and sample_gui.py.
In order to run the examples:
- ensure lelof1py is installed by running
pip install lelof1py - ensure PySimpleGUI is installed by running
pip install pysimplegui - run either
python sample_cli.pyorpython sample_gui.py
CLI sample
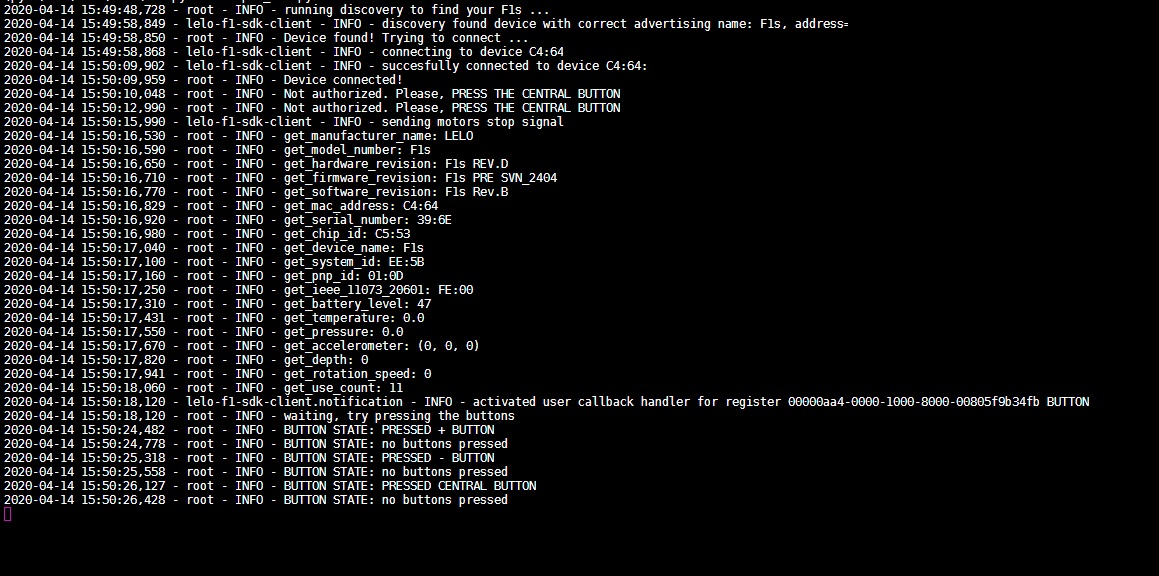
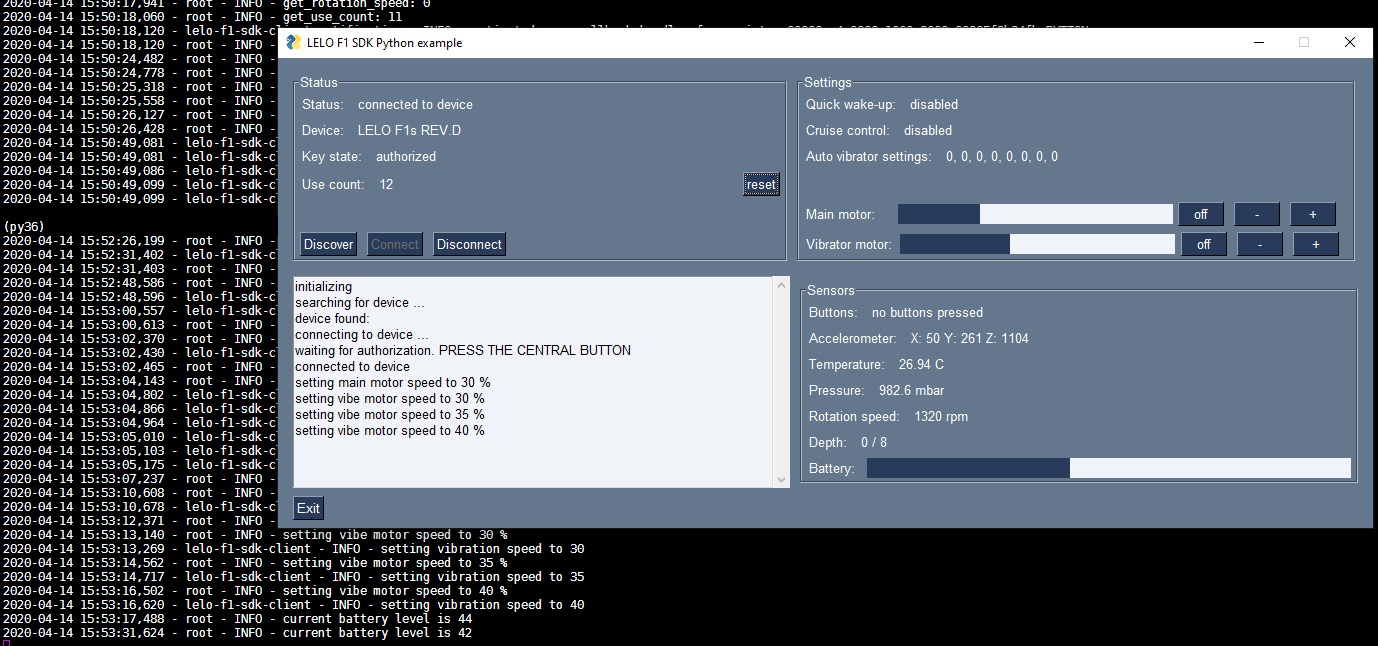
GUI sample
Usage
See the included samples for both inline and GUI usage.
import asyncio
import logging
import lelof1py as f1client
logging.basicConfig(format='%(asctime)s - %(name)s - %(levelname)s - %(message)s', level=logging.INFO)
logging.getLogger(f1client.Constants.LOGGER_NAME).setLevel(logging.INFO)
logging.getLogger(f1client.Constants.LOGGER_IO_NAME).setLevel(logging.WARN)
logging.getLogger('bleak').setLevel(logging.INFO)
async def run():
client = f1client.AsyncClient() # instantiate async client
logging.info('running discovery to find your F1s ...')
devices = await client.discover(timeout=60)
if not len(devices):
logging.info('No devices found!')
return
logging.info('Device found! Trying to connect ...')
await client.connect(devices[0].address, timeout=30)
logging.info('Device connected!')
while not await client.get_key_state():
logging.info('Not authorized. Please, PRESS THE CENTRAL BUTTON')
await asyncio.sleep(2)
logging.debug('now stopping motors for initialization')
await client.stop_motors()
# Read device info
logging.info('get_manufacturer_name: %s', await client.get_manufacturer_name())
logging.info('get_model_number: %s', await client.get_model_number())
logging.info('get_hardware_revision: %s', await client.get_hardware_revision())
logging.info('get_firmware_revision: %s', await client.get_firmware_revision())
# Read sensors data
logging.info('get_battery_level: %s', await client.get_battery_level())
logging.info('get_temperature: %s', await client.get_temperature())
logging.info('get_pressure: %s', await client.get_pressure())
logging.info('get_accelerometer: %s', await client.get_accelerometer())
logging.info('get_depth: %s', await client.get_depth())
logging.info('get_rotation_speed: %s', await client.get_rotation_speed())
logging.info('get_use_count: %s', await client.get_use_count())
logging.info('shutting down device')
await client.shutdown()
# Run the routine inside the main event loop
loop = asyncio.get_event_loop()
loop.run_until_complete(run())Available methods
The following methods are available on client object. Note that most methods are async and should be awaited.
| Method | Input | Output | Async |
|---|---|---|---|
connect |
string address, int timeout (seconds, optional) |
-- | yes |
disable_cruise_control |
-- | -- | yes |
disable_wake_up |
-- | -- | yes |
disconnect |
-- | -- | yes |
discover |
int timeout (seconds, optional), string address (optional) |
list of BLEDevice
|
yes |
enable_cruise_control |
boolean reset (optional) |
-- | yes |
enable_wake_up |
-- | boolean |
yes |
get_accelerometer_x |
-- | int |
yes |
get_accelerometer_y |
-- | int |
yes |
get_accelerometer_z |
-- | int |
yes |
get_accelerometer |
-- |
int tuple(x, y, z) |
yes |
get_battery_level |
-- |
int from 0 to 100 |
yes |
get_buttons_status |
-- | lelof1py.Buttons |
yes |
get_chip_id |
-- | string |
yes |
get_cruise_control |
-- | boolean |
yes |
get_depth |
-- |
int from 0 to 8 |
yes |
get_device_name |
-- | string |
yes |
get_firmware_revision |
-- | string |
yes |
get_hardware_revision |
-- | string |
yes |
get_ieee_11073_20601 |
-- | string |
yes |
get_key_state |
boolean silent (optional) |
boolean |
yes |
get_mac_address |
-- | string |
yes |
get_main_motor_speed |
-- |
int from 0 to 100 |
yes |
get_manufacturer_name |
-- | string |
yes |
get_model_number |
-- | string |
yes |
get_motors_speed |
-- |
int tuple(main, vibe) from 0 to 100 |
yes |
get_pnp_id |
-- | string |
yes |
get_pressure |
-- | -- |
float, in mbar |
get_rotation_speed |
-- |
int (RPS) |
yes |
get_serial_number |
-- | string |
yes |
get_software_revision |
-- | string |
yes |
get_system_id |
-- | string |
yes |
get_temperature_and_pressure |
-- |
float tuple(temperature, pressure) |
yes |
get_temperature |
-- | -- |
float, in C degrees |
get_use_count |
-- | int |
yes |
get_vibration_setting |
-- |
int tuple(V0, ... V7) from 0 to 100 |
yes |
get_vibration_speed |
-- |
int from 0 to 100 |
yes |
get_wake_up |
-- | boolean |
yes |
is_authorized |
-- | boolean |
yes |
is_connected |
-- | boolean |
no |
notify_accelerometer |
callback user_callback |
handler |
yes |
notify_buttons |
callback user_callback |
handler |
yes |
notify_depth |
callback user_callback |
handler |
yes |
notify_key_state |
callback user_callback |
handler |
yes |
notify_rotation_speed |
callback user_callback |
handler |
yes |
notify_temperature_and_pressure |
callback user_callback |
handler |
yes |
ping |
-- | -- | yes |
reset_use_count |
-- | -- | yes |
set_main_motor_speed |
int from 0 to 100 |
-- | yes |
set_motors_speed |
int tuple(main, vibe) from 0 to 100 |
-- | yes |
set_vibration_setting |
-- | -- | yes |
set_vibration_speed |
int from 0 to 100 |
-- | yes |
shutdown |
-- | -- | yes |
stop_motors |
-- | -- | yes |
unregister |
handler callback_handler |
-- | yes |
verify_accelerometer |
-- | -- | yes |
Development
Want to contribute? Great! Please, shoot me an email
