Crate transvoxel
Current version: 1.1.0
(the following is generated from the crate's rustdoc. reading it on docs.rs will probably be a better experience)
This is an implementation of Eric Lengyel's Transvoxel Algorithm in Rust
Credits: Eric Lengyel's Transvoxel Algorithm. https://transvoxel.org/
Brief description of the problem
When extracting meshes with Marching Cubes for adjacent blocks at different level of detail independently, the meshes generally do not match at the blocks' junctions, inducing visible holes:
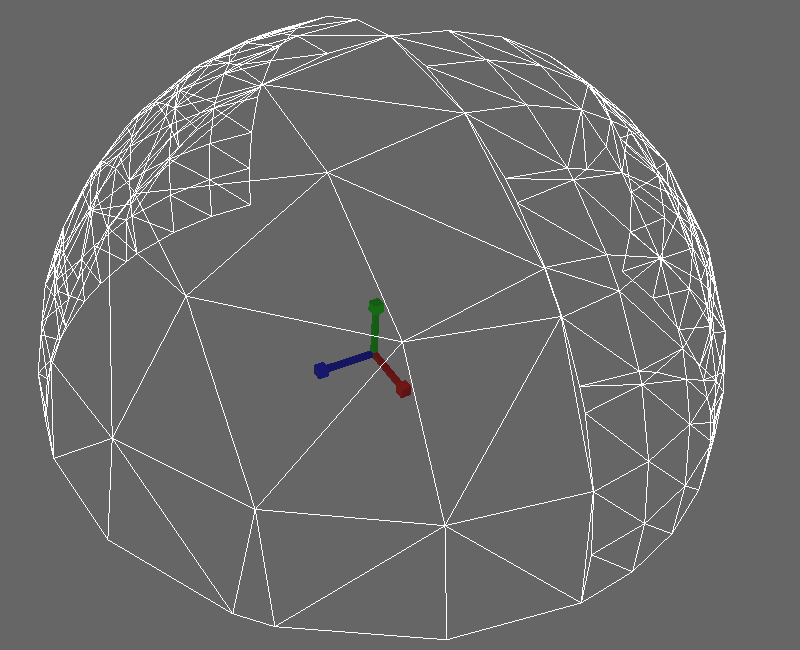
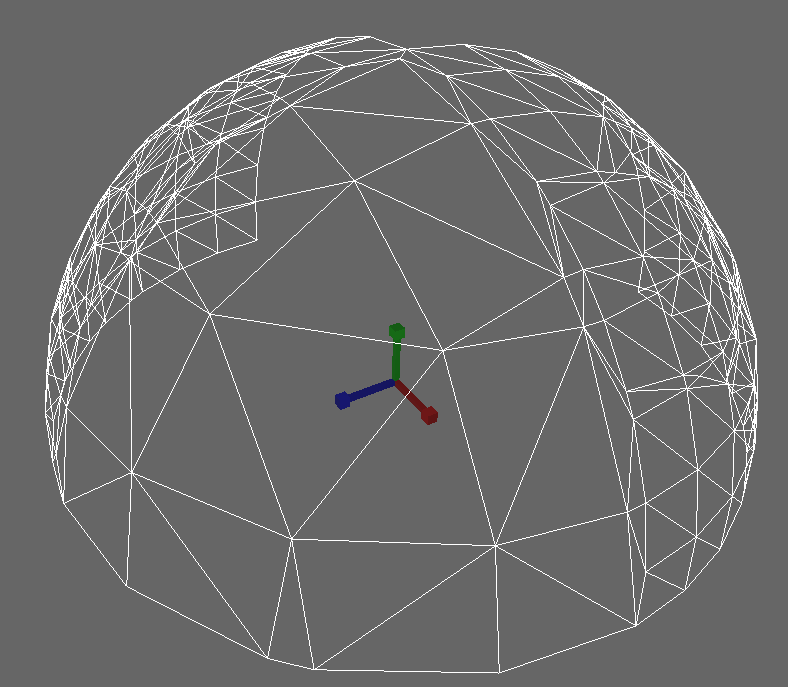
Eric Lengyel's website describes this better and in more details.
Scope
This library only provides functions for extracting a mesh for a block, independently of other blocks. To implement a fully consistent dynamic level-of-detail system, you will also probably need to:
- decide which blocks you need to render and generate meshes for, and at which resolution (typically depending on the camera position and/or orientation)
- track yourself constraints:
- two rendered adjacent blocks can only either have the same resolution, or one have double the resolution of the other
- in that second case, the low resolution block must also be rendered with a transition face in the direction of the high resolution block Currently, it is not possible to "flip" a transition face status on a block, without re-extracting a new mesh for the block. Which means changing the resolution for one block can cascade through constraints to re-generating a few other blocks as well
New in version 1.0.0
- complete rework of the interfaces. Notably: you can now implement a MeshBuilder yourself
- removal of the
bevy_meshfeature: There is code in our examples with various mesh builders for bevy
Basic usage
Either try calling one of the functions in [extraction], or follow the example below:
// The first thing you need is a density provider. You can implement a DataField for that
// but a simpler way, if you are just experimenting, is to use a function:
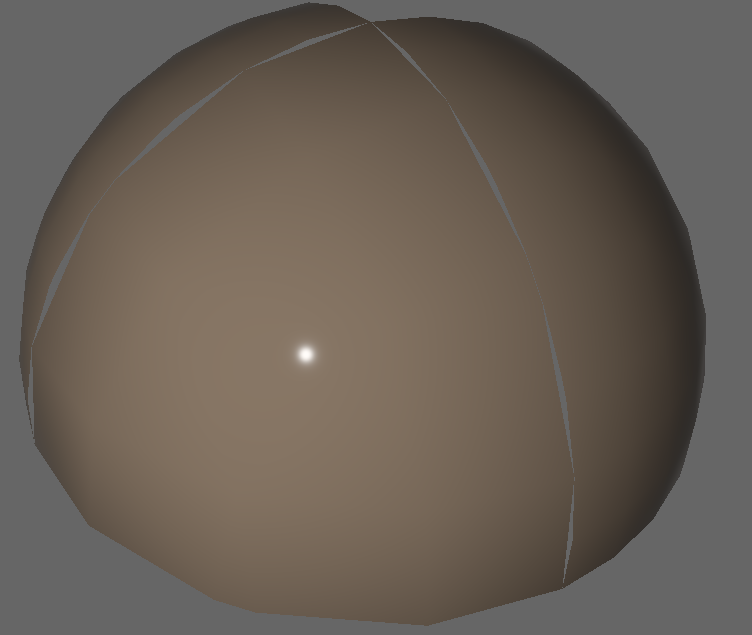
fn sphere_density(x: f32, y: f32, z: f32) -> f32 {
1f32 - (x * x + y * y + z * z).sqrt() / 5f32
}
// Going along with your density function, you need a threshold value for your density:
// This is the value for which the surface will be generated. You can typically choose 0.
// Values over the threshold are considered inside the volume, and values under the threshold
// outside of the volume. In our case, we will have a density of 0 on a sphere centered on the
// world center, of radius 5.
let threshold = 0f32;
// Then you need to decide for which region of the world you want to generate the mesh, and how
// many subdivisions should be used (the "resolution"). You also need to tell which sides of the
// block need to be transition (double-resolution) faces. We use `no_side` here for simplicity,
// and will get just a regular Marching Cubes extraction, but the Transvoxel transitions can be
// obtained simply by providing some sides instead (that is shown a bit later):
use transvoxel::prelude::*;
let subdivisions = 10;
let block = Block::from([0.0, 0.0, 0.0], 10.0, subdivisions);
let transition_sides = transition_sides::no_side();
// Finally, you can run the mesh extraction:
use transvoxel::generic_mesh::GenericMeshBuilder;
let builder = GenericMeshBuilder::new();
let builder = extract_from_field(&sphere_density, &block, threshold, transition_sides, builder);
let mesh = builder.build();
assert!(mesh.tris().len() == 103);
// Extracting with some transition faces results in a slightly more complex mesh:
use transition_sides::TransitionSide::LowX;
let builder = GenericMeshBuilder::new();
let builder = extract_from_field(&sphere_density, &block, threshold, LowX.into(), builder);
let mesh = builder.build();
assert!(mesh.tris().len() == 131);
// Unless, of course, the surface does not cross that face:
use transvoxel::transition_sides::TransitionSide::HighZ;
let builder = GenericMeshBuilder::new();
let builder = extract_from_field(&sphere_density, &block, threshold, HighZ.into(), builder);
let mesh = builder.build();
assert!(mesh.tris().len() == 103);How to use the resulting mesh
A mesh for a simple square looks like this:
Extracted mesh: Mesh {
positions: [
10.0,
5.0,
0.0,
0.0,
5.0,
0.0,
0.0,
5.0,
10.0,
10.0,
5.0,
10.0,
],
normals: [
-0.0,
1.0,
-0.0,
-0.0,
1.0,
-0.0,
-0.0,
1.0,
-0.0,
-0.0,
1.0,
-0.0,
],
triangle_indices: [
0,
1,
2,
0,
2,
3,
],
}
It is made of 4 vertices, arranged in 2 triangles. The first vertex is at position x=10.0, y=5.0, z=0.0 (the first 3 floats in position). As the first in the list, it's index is 0, and we can see it is used in the 2 triangles (the first triangle uses vertices 0 1 2, and the second triangle vertices 0 2 3)
How to request transition sides
use transvoxel::transition_sides::{TransitionSide, no_side};
// If you don't hardcode sides like in the example above, you can build a set of sides incrementally:
// They use the FlagSet crate
let mut sides = no_side();
sides |= TransitionSide::LowX;
sides |= TransitionSide::HighY;
assert!(sides.contains(TransitionSide::LowX));
assert!(!sides.contains(TransitionSide::HighX));Limitations / possible improvements
- Provide a way to extract without normals, or with face normals, which would be much faster
- Output/Input positions/normals are only f32. It should be feasible easily to extend that to f64
- Voxel densities caching is sub-optimal: probably only in the case of an empty block will densities be queried only once per voxel. In non-empty blocks, densities are very likely to be queried several times for some voxels
- Algorithm improvements. See Algorithm
License: MIT OR Apache-2.0
Licensed under either of
- Apache License, Version 2.0 (LICENSE-APACHE or http://www.apache.org/licenses/LICENSE-2.0)
- MIT license (LICENSE-MIT or http://opensource.org/licenses/MIT)
at your option.
Contribution
Unless you explicitly state otherwise, any contribution intentionally submitted for inclusion in the work by you, as defined in the Apache-2.0 license, shall be dual licensed as above, without any additional terms or conditions.

