Horovod


Horovod is a distributed deep learning training framework for TensorFlow, Keras, PyTorch, and Apache MXNet. The goal of Horovod is to make distributed deep learning fast and easy to use.
![]()
Horovod is hosted by the LF AI & Data Foundation (LF AI & Data). If you are a company that is deeply committed to using open source technologies in artificial intelligence, machine, and deep learning, and want to support the communities of open source projects in these domains, consider joining the LF AI & Data Foundation. For details about who's involved and how Horovod plays a role, read the Linux Foundation announcement.
Contents
Documentation
Why Horovod?
The primary motivation for this project is to make it easy to take a single-GPU training script and successfully scale it to train across many GPUs in parallel. This has two aspects:
- How much modification does one have to make to a program to make it distributed, and how easy is it to run it?
- How much faster would it run in distributed mode?
Internally at Uber we found the MPI model to be much more straightforward and require far less code changes than previous solutions such as Distributed TensorFlow with parameter servers. Once a training script has been written for scale with Horovod, it can run on a single-GPU, multiple-GPUs, or even multiple hosts without any further code changes. See the Usage section for more details.
In addition to being easy to use, Horovod is fast. Below is a chart representing the benchmark that was done on 128 servers with 4 Pascal GPUs each connected by RoCE-capable 25 Gbit/s network:

Horovod achieves 90% scaling efficiency for both Inception V3 and ResNet-101, and 68% scaling efficiency for VGG-16. See Benchmarks to find out how to reproduce these numbers.
While installing MPI and NCCL itself may seem like an extra hassle, it only needs to be done once by the team dealing with infrastructure, while everyone else in the company who builds the models can enjoy the simplicity of training them at scale.
Install
To install Horovod on Linux or macOS:
- Install CMake
-
If you've installed TensorFlow from PyPI, make sure that
g++-5or above is installed. Starting with TensorFlow 2.10 a C++17-compliant compiler likeg++8or above will be required.If you've installed PyTorch from PyPI, make sure that
g++-5or above is installed.If you've installed either package from Conda, make sure that the
gxx_linux-64Conda package is installed.
-
Install the
horovodpip package.To run on CPUs:
$ pip install horovod
To run on GPUs with NCCL:
$ HOROVOD_GPU_OPERATIONS=NCCL pip install horovod
For more details on installing Horovod with GPU support, read Horovod on GPU.
For the full list of Horovod installation options, read the Installation Guide.
If you want to use MPI, read Horovod with MPI.
If you want to use Conda, read Building a Conda environment with GPU support for Horovod.
If you want to use Docker, read Horovod in Docker.
To compile Horovod from source, follow the instructions in the Contributor Guide.
Concepts
Horovod core principles are based on MPI concepts such as size, rank, local rank, allreduce, allgather, broadcast, and alltoall. See this page for more details.
Supported frameworks
See these pages for Horovod examples and best practices:
- Horovod with TensorFlow
- Horovod with XLA in Tensorflow
- Horovod with Keras
- Horovod with PyTorch
- Horovod with MXNet
Usage
To use Horovod, make the following additions to your program:
- Run
hvd.init()to initialize Horovod.
-
Pin each GPU to a single process to avoid resource contention.
With the typical setup of one GPU per process, set this to local rank. The first process on the server will be allocated the first GPU, the second process will be allocated the second GPU, and so forth.
-
Scale the learning rate by the number of workers.
Effective batch size in synchronous distributed training is scaled by the number of workers. An increase in learning rate compensates for the increased batch size.
-
Wrap the optimizer in
hvd.DistributedOptimizer.The distributed optimizer delegates gradient computation to the original optimizer, averages gradients using allreduce or allgather, and then applies those averaged gradients.
-
Broadcast the initial variable states from rank 0 to all other processes.
This is necessary to ensure consistent initialization of all workers when training is started with random weights or restored from a checkpoint.
- Modify your code to save checkpoints only on worker 0 to prevent other workers from corrupting them.
Example using TensorFlow v1 (see the examples directory for full training examples):
import tensorflow as tf
import horovod.tensorflow as hvd
# Initialize Horovod
hvd.init()
# Pin GPU to be used to process local rank (one GPU per process)
config = tf.ConfigProto()
config.gpu_options.visible_device_list = str(hvd.local_rank())
# Build model...
loss = ...
opt = tf.train.AdagradOptimizer(0.01 * hvd.size())
# Add Horovod Distributed Optimizer
opt = hvd.DistributedOptimizer(opt)
# Add hook to broadcast variables from rank 0 to all other processes during
# initialization.
hooks = [hvd.BroadcastGlobalVariablesHook(0)]
# Make training operation
train_op = opt.minimize(loss)
# Save checkpoints only on worker 0 to prevent other workers from corrupting them.
checkpoint_dir = '/tmp/train_logs' if hvd.rank() == 0 else None
# The MonitoredTrainingSession takes care of session initialization,
# restoring from a checkpoint, saving to a checkpoint, and closing when done
# or an error occurs.
with tf.train.MonitoredTrainingSession(checkpoint_dir=checkpoint_dir,
config=config,
hooks=hooks) as mon_sess:
while not mon_sess.should_stop():
# Perform synchronous training.
mon_sess.run(train_op)Running Horovod
The example commands below show how to run distributed training. See Run Horovod for more details, including RoCE/InfiniBand tweaks and tips for dealing with hangs.
-
To run on a machine with 4 GPUs:
$ horovodrun -np 4 -H localhost:4 python train.py
-
To run on 4 machines with 4 GPUs each:
$ horovodrun -np 16 -H server1:4,server2:4,server3:4,server4:4 python train.py
-
To run using Open MPI without the
horovodrunwrapper, see Running Horovod with Open MPI. -
To run in Docker, see Horovod in Docker.
-
To run on Kubernetes, see Helm Chart, Kubeflow MPI Operator, FfDL, and Polyaxon.
-
To run on Spark, see Horovod on Spark.
-
To run on Ray, see Horovod on Ray.
-
To run in Singularity, see Singularity.
-
To run in a LSF HPC cluster (e.g. Summit), see LSF.
-
To run on Hadoop Yarn, see TonY.
Gloo
Gloo is an open source collective communications library developed by Facebook.
Gloo comes included with Horovod, and allows users to run Horovod without requiring MPI to be installed.
For environments that have support both MPI and Gloo, you can choose to use Gloo at runtime by passing the --gloo argument to horovodrun:
$ horovodrun --gloo -np 2 python train.pympi4py
Horovod supports mixing and matching Horovod collectives with other MPI libraries, such as mpi4py, provided that the MPI was built with multi-threading support.
You can check for MPI multi-threading support by querying the hvd.mpi_threads_supported() function.
import horovod.tensorflow as hvd
# Initialize Horovod
hvd.init()
# Verify that MPI multi-threading is supported.
assert hvd.mpi_threads_supported()
from mpi4py import MPI
assert hvd.size() == MPI.COMM_WORLD.Get_size()You can also initialize Horovod with an mpi4py sub-communicator, in which case each sub-communicator will run an independent Horovod training.
from mpi4py import MPI
import horovod.tensorflow as hvd
# Split COMM_WORLD into subcommunicators
subcomm = MPI.COMM_WORLD.Split(color=MPI.COMM_WORLD.rank % 2,
key=MPI.COMM_WORLD.rank)
# Initialize Horovod
hvd.init(comm=subcomm)
print('COMM_WORLD rank: %d, Horovod rank: %d' % (MPI.COMM_WORLD.rank, hvd.rank()))Inference
Learn how to optimize your model for inference and remove Horovod operations from the graph here.
Tensor Fusion
One of the unique things about Horovod is its ability to interleave communication and computation coupled with the ability to batch small allreduce operations, which results in improved performance. We call this batching feature Tensor Fusion.
See here for full details and tweaking instructions.
Horovod Timeline
Horovod has the ability to record the timeline of its activity, called Horovod Timeline.
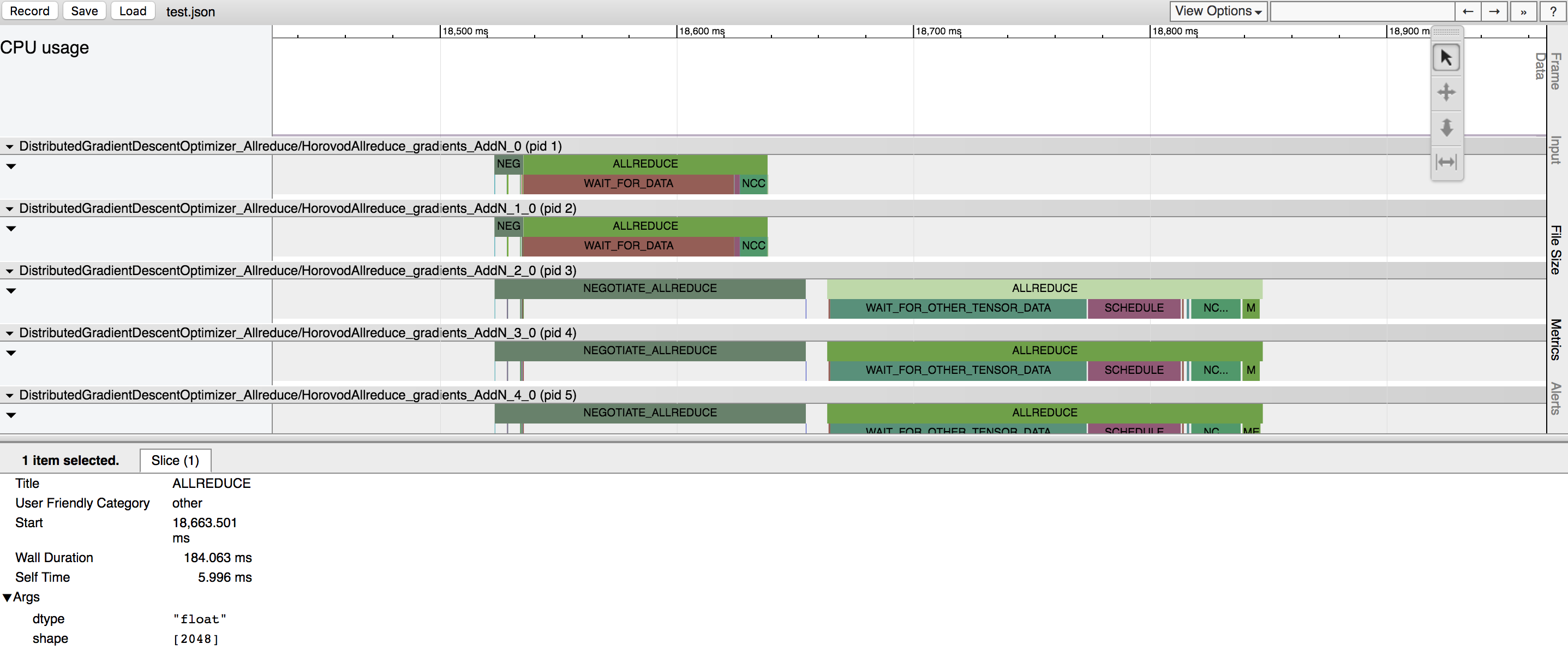
Use Horovod timeline to analyze Horovod performance. See here for full details and usage instructions.
Automated Performance Tuning
Selecting the right values to efficiently make use of Tensor Fusion and other advanced Horovod features can involve
a good amount of trial and error. We provide a system to automate this performance optimization process called
autotuning, which you can enable with a single command line argument to horovodrun.
See here for full details and usage instructions.
Horovod Process Sets
Horovod allows you to concurrently run distinct collective operations in different groups of processes taking part in
one distributed training. Set up hvd.process_set objects to make use of this capability.
See Process Sets for detailed instructions.
Guides
- Run distributed training in Microsoft Azure using Batch AI and Horovod.
- Distributed model training using Horovod.
Send us links to any user guides you want to publish on this site
Troubleshooting
See Troubleshooting and submit a ticket if you can't find an answer.
Citation
Please cite Horovod in your publications if it helps your research:
@article{sergeev2018horovod,
Author = {Alexander Sergeev and Mike Del Balso},
Journal = {arXiv preprint arXiv:1802.05799},
Title = {Horovod: fast and easy distributed deep learning in {TensorFlow}},
Year = {2018}
}
Publications
1. Sergeev, A., Del Balso, M. (2017) Meet Horovod: Uber’s Open Source Distributed Deep Learning Framework for TensorFlow. Retrieved from https://eng.uber.com/horovod/
2. Sergeev, A. (2017) Horovod - Distributed TensorFlow Made Easy. Retrieved from https://www.slideshare.net/AlexanderSergeev4/horovod-distributed-tensorflow-made-easy
3. Sergeev, A., Del Balso, M. (2018) Horovod: fast and easy distributed deep learning in TensorFlow. Retrieved from arXiv:1802.05799
References
The Horovod source code was based off the Baidu tensorflow-allreduce repository written by Andrew Gibiansky and Joel Hestness. Their original work is described in the article Bringing HPC Techniques to Deep Learning.
Getting Involved
- Community Slack for collaboration and discussion
- Horovod Announce for updates on the project
- Horovod Technical-Discuss for public discussion
- Horovod Security to report security vulnerabilities























