![]()
Python software for symbolic power system modeling and numerical analysis, serving as the core simulation engine for the CURENT Largescale Testbed.
| Latest | Stable | |
|---|---|---|
| Documentation |
| Badges | ||
|---|---|---|
| Downloads |  |
 |
| Try on Binder | ||
| Code Quality | ||
| Build Status |
This software could be of interest to you if you are working on DAE modeling, simulation, and control for power systems. It has features that may be useful if you are applying deep (reinforcement) learning to such systems.
ANDES is by far easier to use for developing differential-algebraic equation (DAE) based models for power system dynamic simulation than other tools such as PSAT, Dome and PST, while maintaining high numerical efficiency.
ANDES comes with a rich set of commercial-grade dynamic models with all details implemented, including limiters, saturation, and zeroing out time constants.
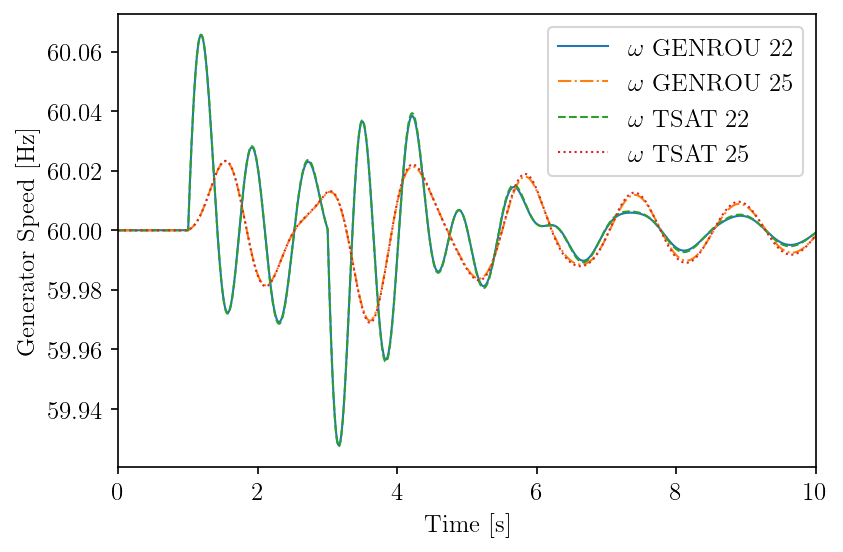
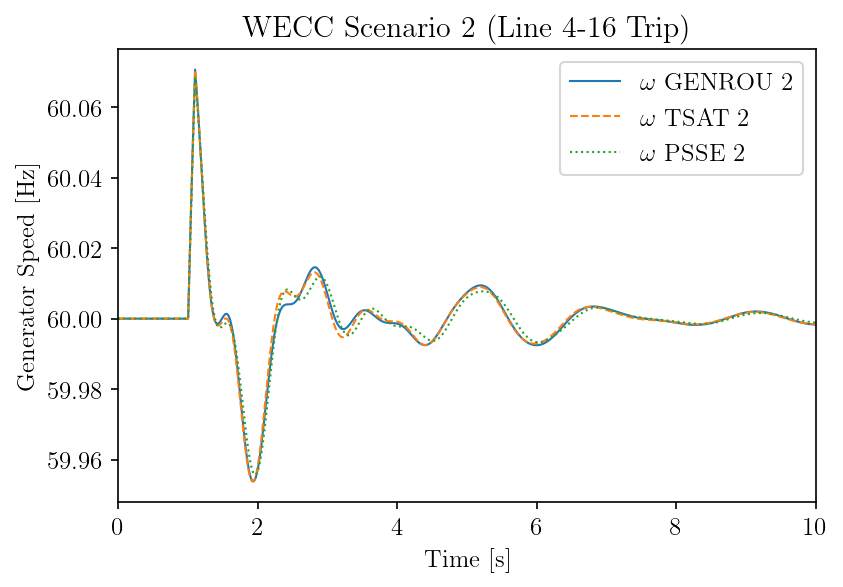
ANDES produces credible simulation results. The following table shows that
-
For the Northeast Power Coordinating Council (NPCC) 140-bus system (with GENROU, GENCLS, TGOV1 and IEEEX1), ANDES results match perfectly with that from TSAT.
-
For the Western Electricity Coordinating Council (WECC) 179-bus system (with GENROU, IEEEG1, EXST1, ESST3A, ESDC2A, IEEEST and ST2CUT), ANDES results match closely with those from TSAT and PSS/E. Note that TSAT and PSS/E results are not identical, either.
| NPCC Case Study | WECC Case Study |
|---|---|
 |
 |
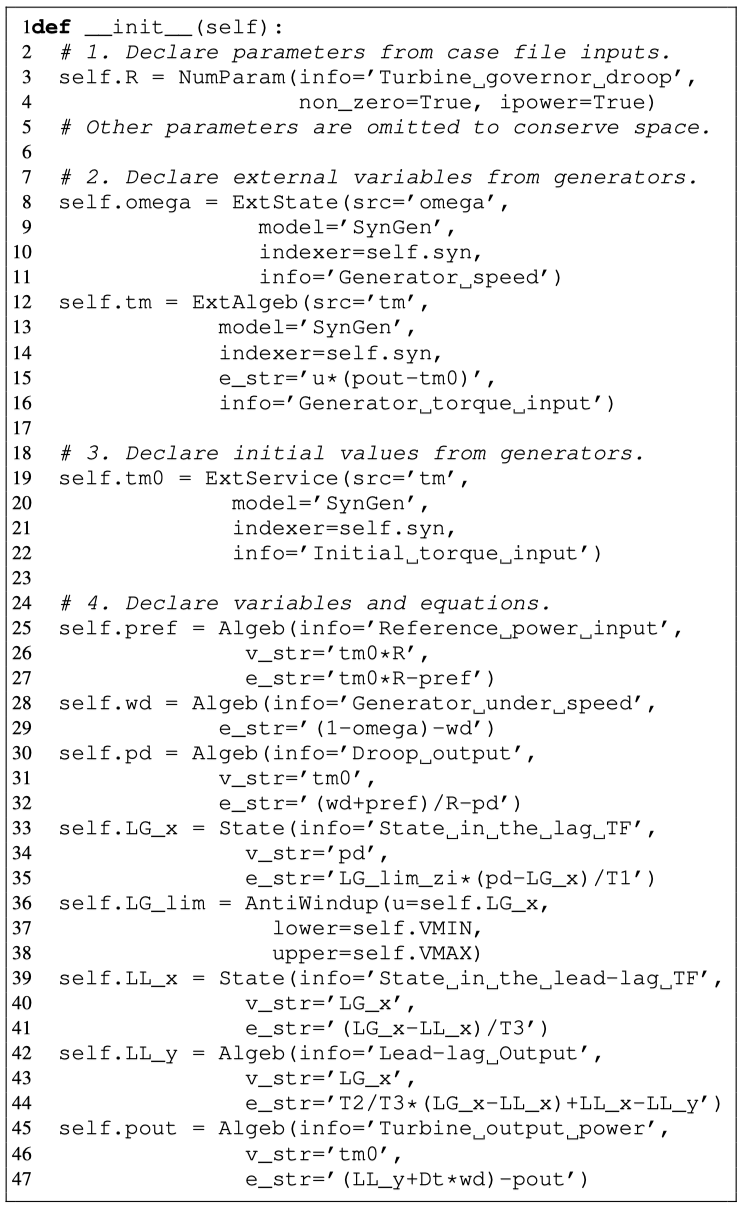
ANDES provides a descriptive modeling framework in a scripting environment. Modeling DAE-based devices is as simple as describing the mathematical equations. Numerical code will be automatically generated for fast simulation.
| Controller Model and Equation | ANDES Code |
|---|---|
Diagram: 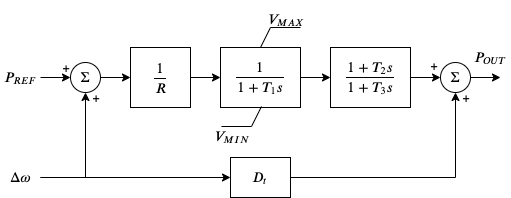 Write into DAEs: 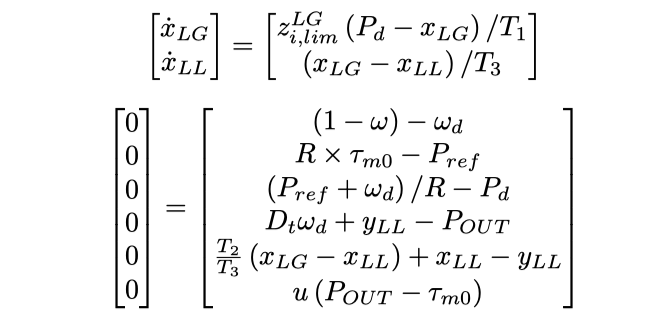
|
 |
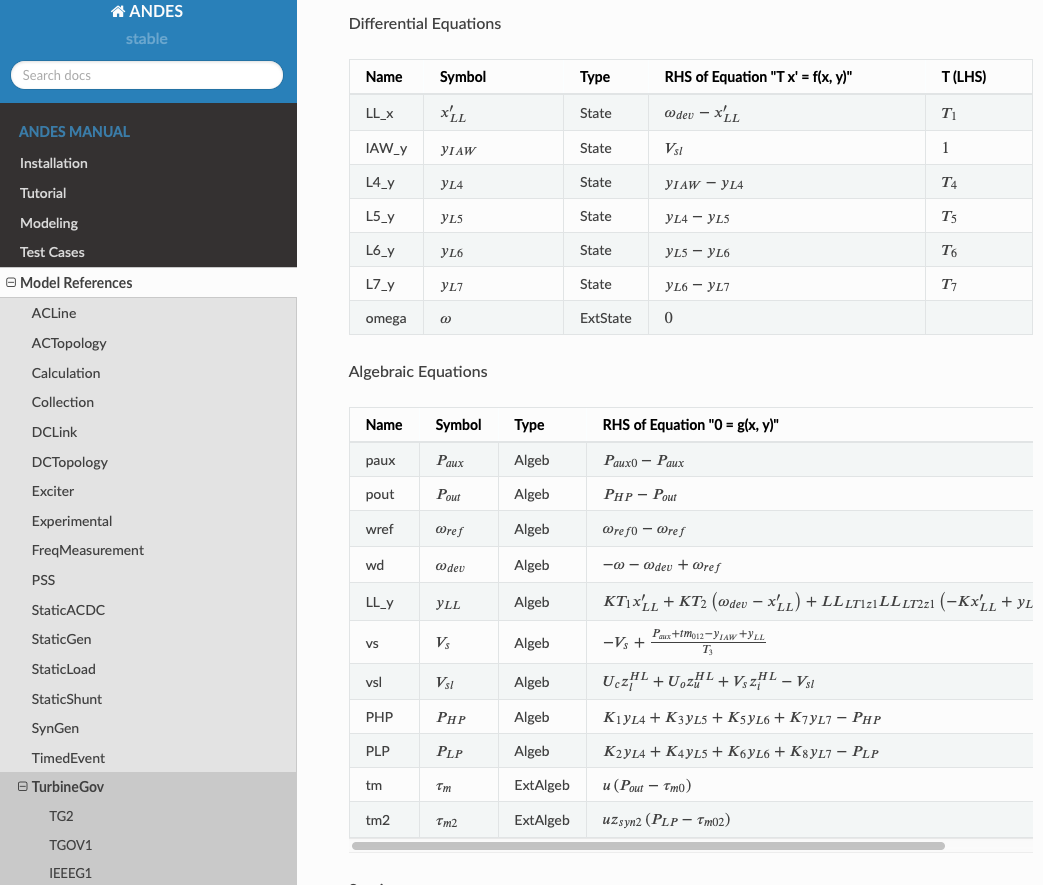
In ANDES, what you simulate is what you document. ANDES automatically generates model documentation, and the docs always stay up to date. The screenshot below is the generated documentation for the implemented IEEEG1 model.
In addition, ANDES features
- a rich library of transfer functions and discontinuous components (including limiters, deadbands, and saturation functions) available for model prototyping and system analysis.
- industry-grade second-generation renewable models (solar PV, type 3 and type 4 wind), distributed PV and energy storage model.
- routines including Newton method for power flow calculation, implicit trapezoidal method for time-domain simulation, and full eigenvalue analysis.
- developed with performance in mind. While written in Python, ANDES can finish a 20-second transient simulation of a 2000-bus system in a few seconds on a typical desktop computer.
- out-of-the-box PSS/E raw and dyr data support for available models. Once a model is developed, inputs from a dyr file can be immediately supported.
ANDES is currently under active development. Use the following resources to get involved.
- Start from the documentation for installation and tutorial.
- Check out examples in the examples folder
- Read the model verification results in the examples/verification folder
- Try in Jupyter Notebook on Binder
- Ask a question in the GitHub Discussions
- Report bugs or issues by submitting a GitHub issue
- Submit contributions using pull requests
- Read release notes highlighted here
- Check out and and cite our paper
If you use ANDES for research or consulting, please cite the following paper in your publication that uses ANDES
H. Cui, F. Li and K. Tomsovic, "Hybrid Symbolic-Numeric Framework for Power System Modeling and Analysis," in IEEE Transactions on Power Systems, vol. 36, no. 2, pp. 1373-1384, March 2021, doi: 10.1109/TPWRS.2020.3017019.
Please let us know if you are using ANDES for research or projects. We kindly request you to cite our paper if you find ANDES useful.




This work was supported in part by the Engineering Research Center Program of the National Science Foundation and the Department of Energy under NSF Award Number EEC-1041877 and the CURENT Industry Partnership Program.
This work was supported in part by the Advanced Grid Research and Development Program in the Office of Electricity at the U.S. Department of Energy.
See GitHub contributors for the contributor list.
ANDES is licensed under the GPL v3 License.

















