![]()


![]()
PyMechanical brings Ansys Mechanical to Python. It enables your Python programs to use Mechanical within Python's ecosystem. It includes the ability to:
- Connect to a remote Mechanical session
- Embed an instance of Mechanical directly as a Python object
Install PyMechanical using pip with:
pip install ansys-mechanical-core
For more information, see Install the package in the PyMechanical documentation.
You must have a licensed copy of Ansys Mechanical installed. When using an embedded instance, that installation must be runnable from the same computer as your Python program. When using a remote session, a connection to that session must be reachable from your Python program.
PyMechanical uses the built-in scripting capabilities of Mechanical. For information on the scripting APIs available, see the Scripting in Mechanical Guide in the Ansys Help.
On a Windows system, the environment variable AWP_ROOT<ver> is configured when Mechanical is
installed, where <ver> is the Mechanical release number, such as 242 for release 2024 R2.
PyMechanical automatically uses this environment variable (or variables if there are multiple
installations of different versions) to locate the latest Mechanical installation. On a Linux
system, you must configure the AWP_ROOT<ver> environment variable to point to the
absolute path of a Mechanical installation.
To start a remote session of Mechanical on your computer from Python, use the launch_mechanical()
method. This methods returns an object representing the connection to the session:
import ansys.mechanical.core as pymechanical
mechanical = pymechanical.launch_mechanical()Given a connection to a remote session, you can send an IronPython script. This uses the built-in scripting capabilities of Mechanical. Here is an example:
result = mechanical.run_python_script("2+3")
result = mechanical.run_python_script("ExtAPI.DataModel.Project.ProjectDirectory")PyMechanical also supports directly embedding an instance of Mechanical as a Python object. In this mode, there is no externally running instance of Mechanical. This feature is supported on Windows and Linux for version 2023 R2 and later. Here is an example:
import ansys.mechanical.core as pymechanical
app = pymechanical.App()
app.update_globals(globals())
project_dir = DataModel.Project.ProjectDirectoryDocumentation for the latest stable release of PyMechanical is hosted at PyMechanical documentation.
In the upper right corner of the documentation's title bar, there is an option for switching from viewing the documentation for the latest stable release to viewing the documentation for the development version or previously released versions.
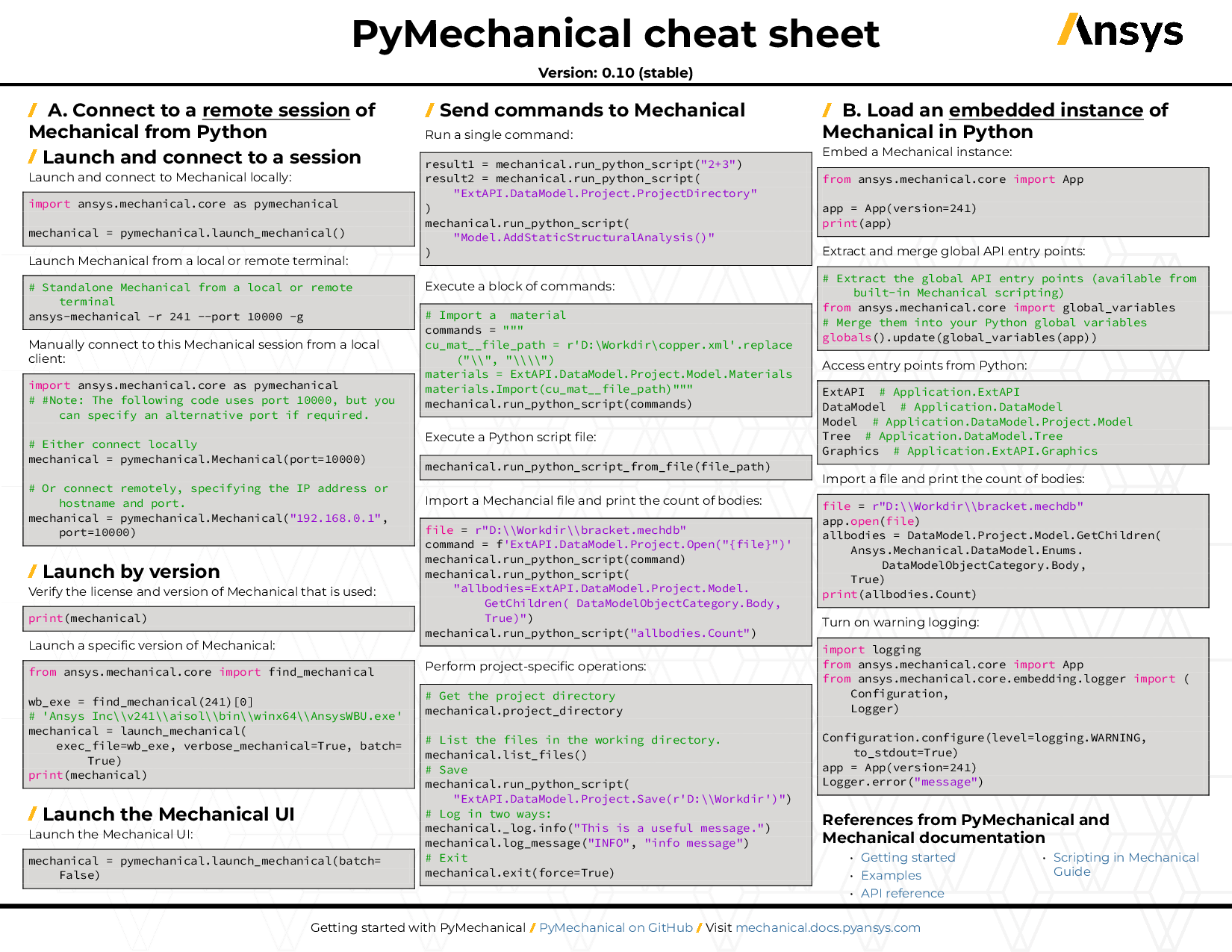
You can also view or download the PyMechanical cheat sheet. This one-page reference provides syntax rules and commands for using PyMechanical.
On the PyMechanical Issues page, you can create issues to report bugs and request new features. On the PyMechanical Discussions page or the Discussions page on the Ansys Developer portal, you can post questions, share ideas, and get community feedback.
To reach the project support team, email pyansys.core@ansys.com.
If you would like to test or contribute to the development of PyMechanical, see Contribute in the PyMechanical documentation.
![dependabot[bot]](https://avatars.githubusercontent.com/u/49699333?size=120)





![pre-commit-ci[bot]](https://avatars.githubusercontent.com/u/66853113?size=120)











{kind=link}