opof-sbmp
OPOF Sampling-based motion planning (SBMP) domains for high-DoF robots to accomplish real-world picking tasks. They include the optimization of planner hyperparameters, sampling distributions, and projections.
![]()
opof-sbmp is maintained by the Kavraki Lab at Rice University.
Installation
$ pip install opof-sbmpopof-sbmp is officially tested and supported for Python 3.9, 3.10, 3.11 and Ubuntu 20.04, 22.04.
Domain: SBMPHyp[env,planner]
from opof_sbmp.domains import SBMPHyp
# Creates a SBMPHyp domain instance for the "Bookshelf" environment using the "RRTConnect" planner.
domain = SBMPHyp("Bookshelf", "RRTConnect") Description
We explore doing sampling-based motion planning in a specified environment using a specified planner. Unlike the grid world domains, these planners are much more complex and the relationship between the choice of planning parameters and planner performance is unclear. This makes it particularly suitable for OPOF, since we treat the planner as closed black-box function and specifically assume no knowledge of the planner's internals.
Planner optimization problem
The robot is tasked with moving its arm(s) from a start configuration to a goal configuration by running a sampling-based motion planner.
The planner optimization problem is to find a generator
Planning objective
Problem instance distribution
The training set and testing set contain
Environments
Cage

Description
A (6)-dof UR5 robot is tasked to pick up a block (green) in a cage, starting from a random robot configuration. The position and orientation of the cage, as well as the position of the block in the cage, are randomized.
Bookshelf

Description
A (8)-dof Fetch robot is tasked to reach for a cylinder in a bookshelf, starting from a random robot configuration. The position and orientation of the bookshelf and cylinders, as well as the choice of cylinder to reach for, are randomized.
Table
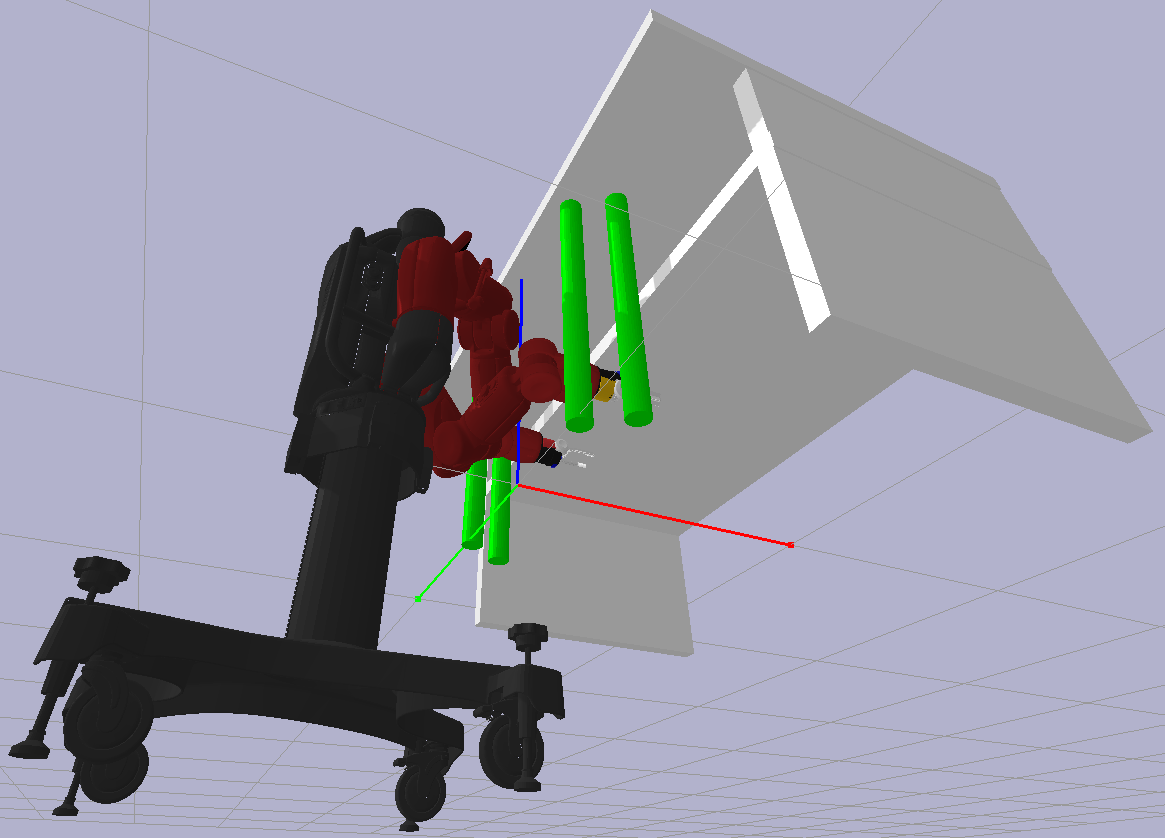
Description
A (14)-dof dual-arm Baxter robot must fold its arms crossed in a constricted space underneath a table and in between two vertical bars, starting from a random robot configuration. The lateral positions of the vertical bars are randomized.
Planners
RRTConnect
Description
We grow two random search trees from the start and the goal configurations toward randomly sampled target points in the free space, until the two trees connect.
Planner hyperparameters
We tune the following parameters:
-
range
$\in [0.01, 5.00]$ parameter, which limits how much to extend the trees at each step; and - a weight vector
$\in \mathbb{R}^{50}$ with non-negative entries summing to$1$ , which controls the sampling of target points using the experience-based sampling scheme adapted from here.
LBKPIECE1
Description
Two random search trees are grown from the start and the goal configurations, but controls the exploration of the configuration space using grid-based projections.
Planner hyperparemeters
We tune the following parameters:
-
range
$\in [0.01, 5.00]$ which determines ho wmuch to extend the trees at each step; -
border_fraction
$\in [0.001, 1]$ which determins how much to focus exploration on unexplored cells; -
min_valid_path_fraction
$\in [0.001, 1]$ which determins the threshold for which partially valid extensions are allowed; and - a projection vector
$[0, 1]^{2 \times d} \subset \mathbb{R}^{2 \times d}$ which corresponds to the linear projection function used to induce the 2-dimensional exploration grid, where$d$ is the robot's number of degrees of freedom.
Citing
If you use opof-sbmp, please cite us with:
@article{lee23opof,
author = {Lee, Yiyuan and Lee, Katie and Cai, Panpan and Hsu, David and Kavraki, Lydia E.},
title = {The Planner Optimization Problem: Formulations and Frameworks},
booktitle = {arXiv},
year = {2023},
doi = {10.48550/ARXIV.2303.06768},
}
@article{lee22apes,
title={Adaptive Experience Sampling for Motion Planning using the Generator-Critic Framework},
author = {Lee, Yiyuan and Chamzas, Constantinos and E. Kavraki, Lydia},
year = {2022},
month = jul,
journal={IEEE Robotics and Automation Letters},
}
License
opof-sbmp is licensed under the BSD-3 license.
opof-sbmp includes a copy of the following libraries as dependencies. These copies are protected and distributed according to the corresponding original license.
opof-sbmp is maintained by the Kavraki Lab at Rice University, funded in part by NSF RI 2008720 and Rice University funds.
